FInal Project Milestone 3 – Job Bedford
Goal: Orchestrate sounds producing (sampler) and Combination of Hardware and Software.
Sampler:
Originally, planning to trigger sound files in max to play one at a time, but this approach proved to limited. Audio would need to complete finish play 808 drum sound or interrupt it prematurely to keep up with users triggering.
Ali.sampler object in max allowed for multiple sound files to be played at once and layer over tope of each other to gain a poly-morfic effect.
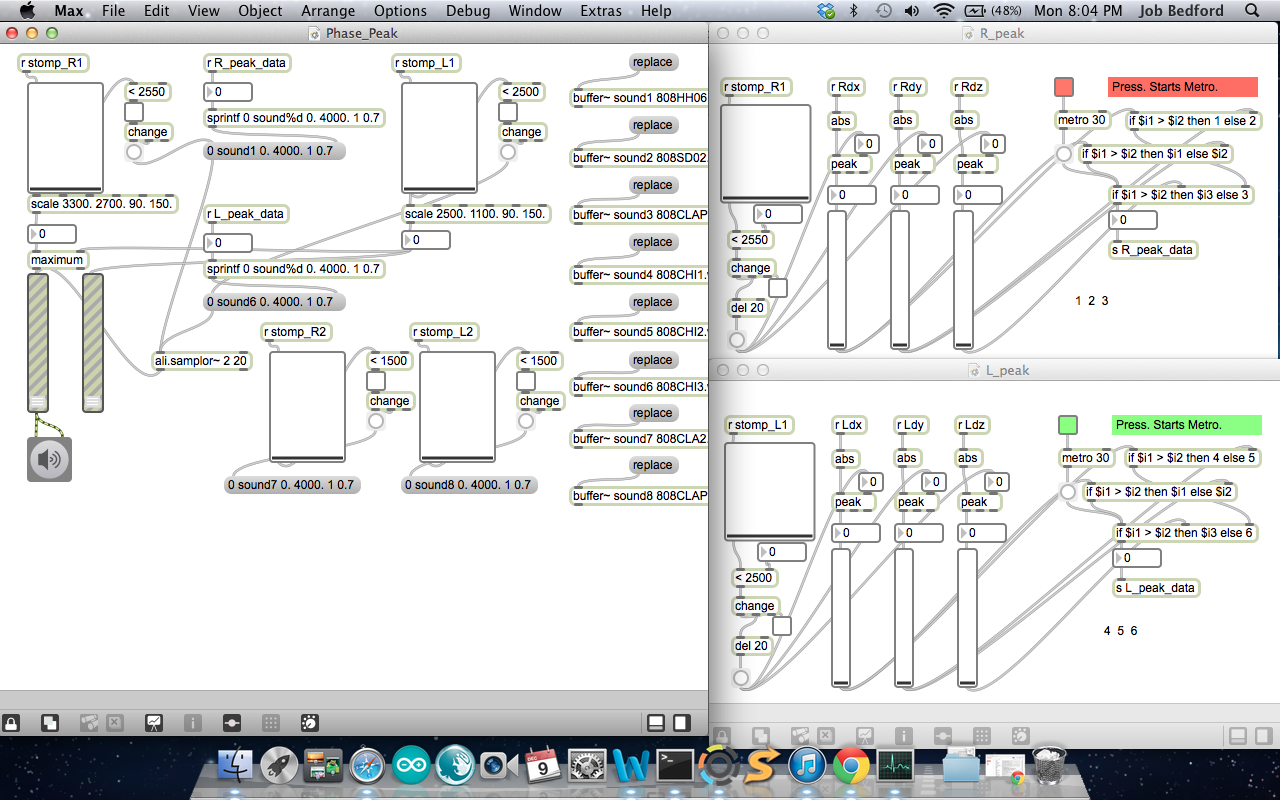
Code:
Start of with a keyboard for your feet that implements a drum sound based on dance step.
This week was fill with experimenting with various way to play sound files in max. Tested continuous cycles and frequencies with phasors and groove object. Adapted playback volume and file choice decision based on analog data. Attempted to choose sound based on peak jerk accelerometer data from each leg, but accelerometer data is not clean enough a fast movements to grant consistent readings. So
Establish streamline method of read data. Run each accelerometer data through a smoothing filter. The Y-axis reading for each leg was offset due to 1 g of gravity in the downward direction. To counteract this for quick readings, the derivates of each of the accelerometer data were taken, and routed to the analog peak choosing method for sound files.
Since the peak method proved unsuccessful, A smart option was utilized…… the Wekinator.
Wekinator is a Neural Network Machine learning algorithm that takes in a set number of variables and yield how any number of parameters you want to fluctuate and changes depending how you train it. The Wekinator is ideal for reading the position of certain foot position and matching them to a number for a sound file to be played. It’s limitation are that is doesn’t offer discrete numbers, which becomes haphazard when in-between positions.
Since Wekinator failed to produced desired results. Switched to Node based estimation of foot position.
Accelerometer determine acceleration in 3-directions (xyz). Gravity constantly impose a 1 g of downward force on the sensor. Utilizing this, one can roughly determine the orientation of sensor. different step position have different orientation and leans of the shin. Utilizing this I can roughly differentiate steps in the X-Z plane of the floor. using the Node object in max set up 2D plane a specified area of different sound. Various combination of Heel or Ball press and the two shins reading triggers preset sounds. This method produce best results so far.

Combination of Hardware and Software:
Integration of Hardware and software was straightforward due to the established wireless.


A interesting trait of this instrument in that it’s Completely Concealable.