Final Project Milestone 1 – Robert Kotcher, M. Haris Usmani
Robert and I set forth to complete the following tasks in this first week:
- Experiment with different actuators
- Explore the sounds we can make
- Explore how rooms may sound differently
- Get recordings and play with some DSP to get an understanding of things
We pretty much got through most of that, but the phase of exploration is a never ending one- we now have the prototypes we need to play around and explore sounds in different rooms, like we did this week for our class-room.
Exploring Actuators:
We considered three actuators to start with:
i) Loud speakers 2) Audio Transducers
The loud speaker and the audio transducer were to be fed by an audio signal convoluted with the class-room’s impulse response (IR). This would (in theory) make a room’s reverb twice as effective and would result in the ‘interesting’ resonant effects we need. First, this required the room’s IR to be found- we found HISSTools to be very helpful. We were able to get example patches that used HISSTools to capture IR of a room.
Exponentials were sweeped across the frequency range and the response recorded and processed. Once we had the IR, we simple convolved it with our audio signal and played it back to the room using speakers we had: Studio Monitors in this case.

We observed that the low-frequency resonance gets very strong and it seems to trace and amplify the right frequencies to literally “shake the room”.
To explore what the high-end resonance would sound like, we used an open mid-range speaker (with a weak bass response as it had no enclosure).

It seemed to produce more of a high ringing noise but less drastic effects than that of the low frequency resonance.
3) Electromagnetic Striker:

The prototype Striker actuator was built using a Teensy, rotary solenoid and drumstick with a nylon head. We experimented with a variety of striking objects, but found that this drumstick was light and was able to characterize the room nicely, without the drumstick itself sounding too loudly.
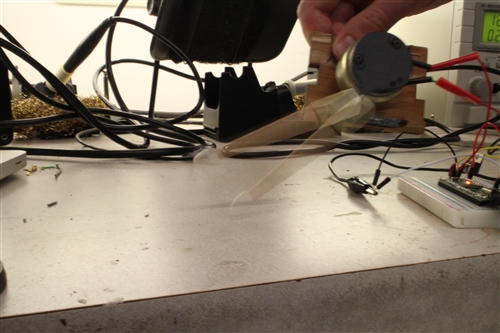
An issue we’re facing now is the solenoid making sounds of its own. We may be able to modify it or use a different type of solenoid. A final prototype will consist of a self-contained and portable actuator in an enclosed case, with a more refined attachment for the drum stick. While the software hasn’t been written yet, it will instruct the solenoid to play the room in response to the performer.
Learning Outcomes:
We plan to use the IR Response to assign characteristic sounds to our actuators- this mapping has yet to be tried and tested but we expect to get something interesting.
Also, we feel we need another actuator as the loud speaker or audio transducer are very similar as far as low frequency resonance is concerned. The transducer requires contact with the surface, so we may just choose the loud-speaker over it. A third actuator may be a scratcher.
To capture the true IR of the room, we may use a pair of balanced omni-directional microphones placed at the listener’s position in the room- right now, our cost-effective condenser mic isn’t giving us the true IR but is accurate enough to get things started.

Throughout the course of exploration, we also kept the bigger picture in mind- these are a few changes we made to the initial setup for a more cost-effective and convenient implementation:
– Raspberry Pi replaced with Udoo (Due to the Cost of Audio I/O and Wireless Access we require)
– Having a central PC that listens to the performer and ‘conducts’ the room (sends audio/controls to crickets)
These considerations will be given more though and design decisions will be made based on more experimentation.