Group Project: Wireless Data + Wireless Video System (part 2)
Overview
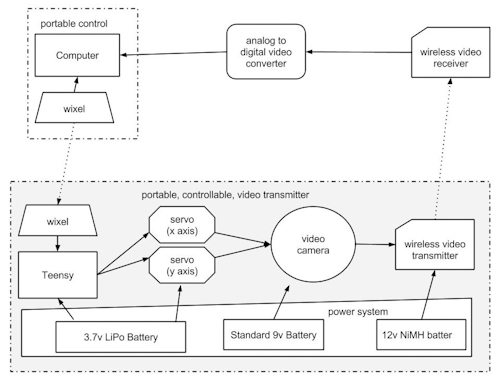
This project combines a Wixel wireless data system, servos, microcontrollers and wireless analog video in a small, custom-built box to provide wireless video with remote viewfinding control.

Hardware
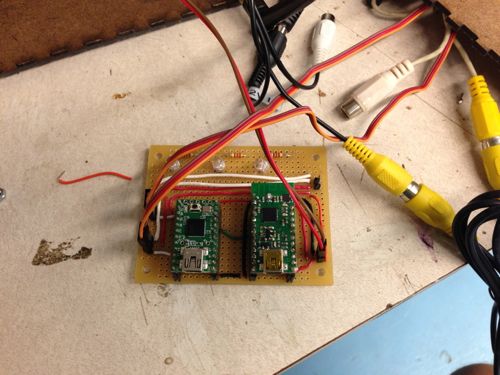
Camera-Box:
- Wixel wireless module
- Teensey 2.0 (code found HERE)
- Wireless video transmitter
- 3.3v servo (2x)
- FatShark analog video camera
- 12v NiMH battery
- 9v battery
- 3.7v LiPo battery
- Adafruit LiPo USB charger
Control Side:
- Alpha wireless video receiver
- Analog to Digital video converter (ImagingSource DFG firewire module)
- Wixel Wireless unit
- Max/MSP (patch found HERE)
System Diagram:
Tips and Gotchas:
1. Max/MSP Patch Setup:
- Connect the your preferred video ADC to your computer
- Open the patch
- hit the “getvdevlist” message box , select your ADC in the drop-down menu
- hit the “getinputlist” message box, select the correct input option (if there are multiple on your unit)
- if you see ““NO SIGNALS” in the max patch:
- double check the cables… this is a problem with older analog video
- verify that the camera and wireless transmitter are powered at the correct voltage
2. Power Choices:
- We ended up using three power sources within the box. This isn’t ideal, but we found that power requirement for the major components (teensey, wixel, transmitter, camera) are somewhat particular. Also keep in mind that the video transmitter is the largest power consumer at around 300mA.
Applications:
1. Face Detection and 2. Blob Tracking
Using the cv.jit suite of objects, we built a patch that pulls in the wireless video feed from the box and uses openCV’s face detection capabilities to identify people’s faces. The same patch also uses openCV’s background removal and blob tracking functions to follow blob movement in the video feed.
Future projects can use this capability to send movement data to the camera servos once a face was detected, either to center the person’s face in the frame, or to look away as if it were shy.
We can also use the blob tracking data to adjust playback speed or signal processing parameters for the delayed video installation mentioned in the first part of this project.
3. Handheld Control

In an effort to increase the mobility and potential covertness of the project, we also developed a handheld control device that could fit in a user’s pocket. The device uses the same Wixel technology as the computer-based controls, but is battery operated and contains its own microcontroller.