The Project
Our world is defined by what we see. However beneath our feet exist an enormous and elaborate system of creations. With the aid of a microscope and camera I am seeking to recreate through 3D modeling the millimeter scale for the centimeter scale that we live in. This project is enabled by key advancements in 3D modeling software such at Autodesk’s 123D Catch.
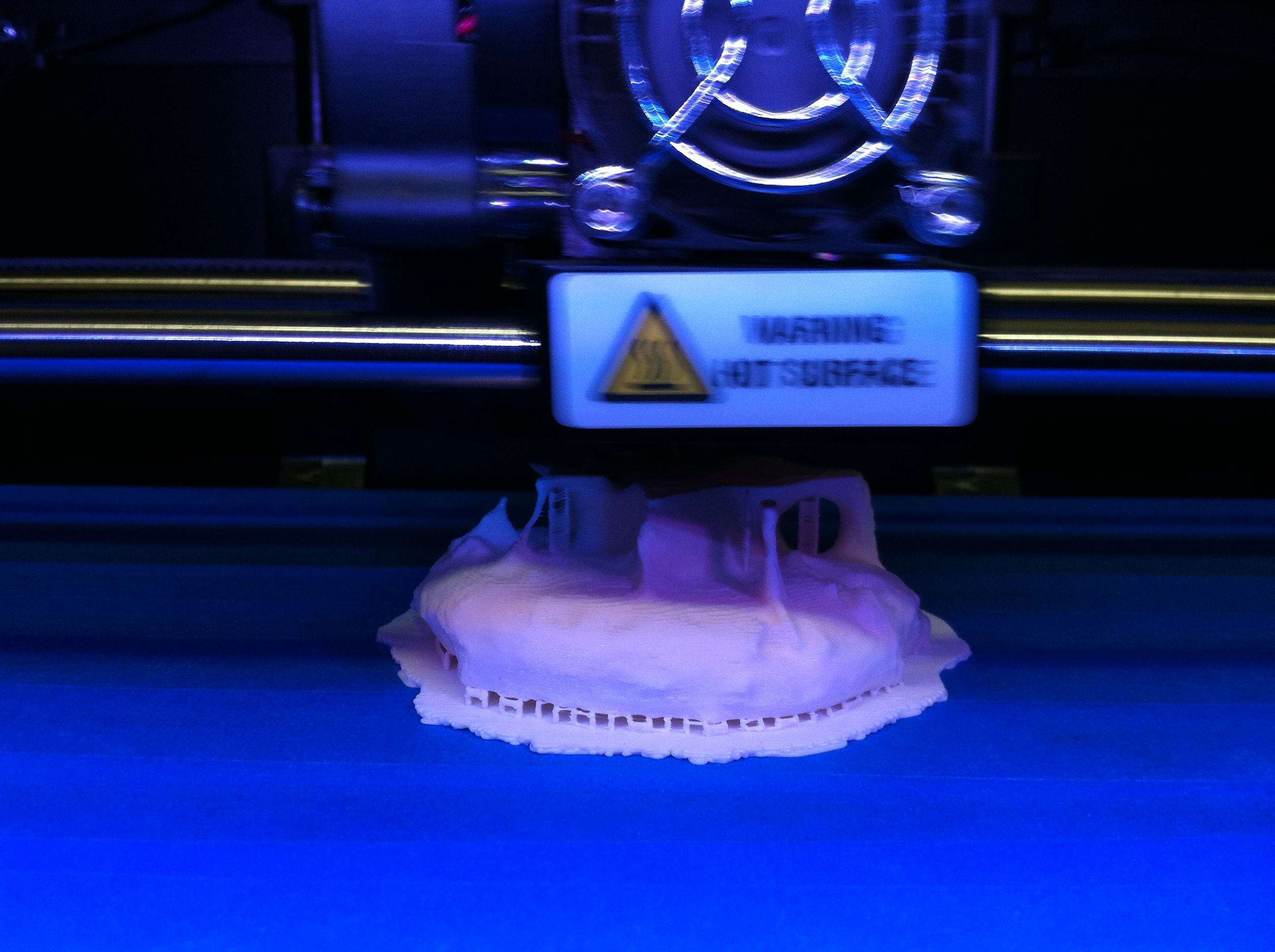
The process for capture is fairly simple. A series of photographs are taken of an object from every direction. These photographs are stitched together and distance is interpolated resulting in a 3D model. The chair model below is a good illustration. About 40 photographs were taken from a variety of angles and then uploaded to 123D Catch.
Chair Test
Milestone 1
The goal of my first milestone was to create a functioning 3D scanning jig as well as perform some research into objects to capture.
Scanning Jig
The scanning jig is based around a microscope. I began with a usb microscope, but it quickly proved not to have the necessary image resolution.
Example of the USB microscope:

The Original Microscope Jig
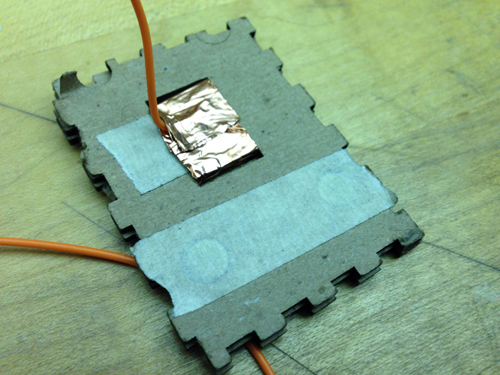
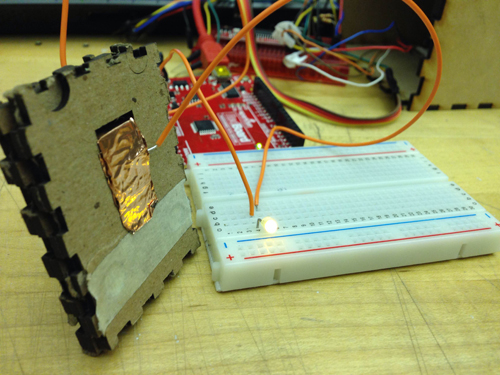
I discovered that my iPhone camera was high enough resolution with the added advantage of being easy to work with. I got hold of a microscope from the robotics club and set-up a few tests holding my camera to the lenses. I created a rotating stand for the object with a LEGO piece, tape and cardboard.

Lessons Learned
From this first prototype I learned that it important to have a textured surface for the rotating base. The 3D capture software relies on picking out key points in each photo, so a textured base provides more unique points for the software. I also discovered the importance of a stable camera. The model below turned out poorly as camera jitter made depth interpolation difficult.
Piece of Solder
Upgraded Jig
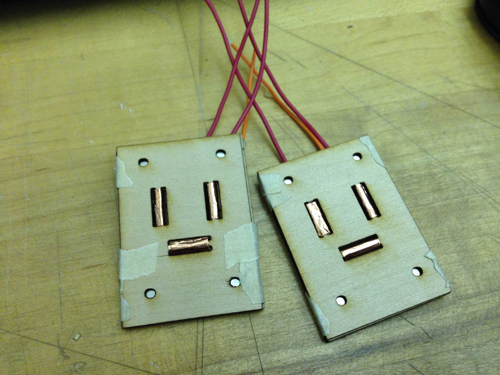
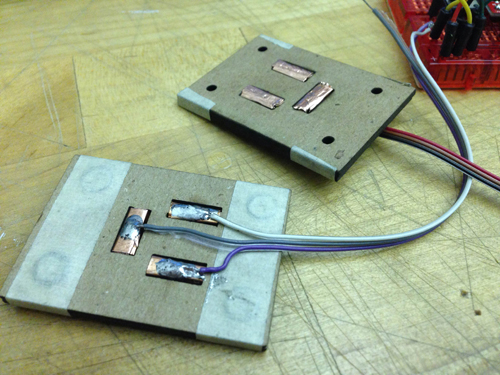
The first jig was upgraded first with the use of magic arms for camera stabilization as well a a sturdier turning base. The base utilized the same LEGO piece but was planted in clay in order to make the assembly flexible. I wanted to be able to change platform height and angle easily.
The Photo Platform

Jig Results: Acorn
What to Capture?
5 ideas on interesting things to capture. I will pursue one or more.
Food
Food doesn’t always look as nice close up. This project would provide a new perspective on good food at a new scale.
Chewed Gum
A walk in the woods
I grew up playing in the woods. It was always an adventure – new bugs lay under every rock and dirt could be molded into innumerable forts. I have gradually left the woods behind (as I imagine most of us are doing these days). My goal with this track would be to take a simple walk through the woods (Schenley Park) and record any and all interesting discoveries that I make. These critters, rocks and leaves would then be created as physical models to capture some of that excitement of discovery.
A Rolly-polly Bug

Surfaces
We have a good sense of how a surface might feel, but how does touch translate to the physical look of a material? Surfaces would be recreated in larger scale so that roughness becomes visibly rough and the finer details of materials like velcro can be seen.
Velcro

Close-up
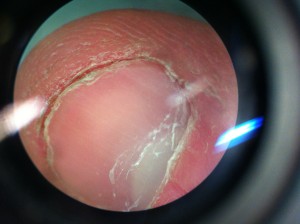
Inspiration for this track comes from hyper-realism. The goal here is to take a close-up look at less elegant human features. Following the lead from Ron Mueck, these captures would transformed into larger then life models.
A Fingernail
Fluids
Water forms differently on different surfaces. This track would explore the interaction between water on various surfaces and under varying conditions (heat, vibration, pressure, sunlight). As a comparison other fluids such as oil could be used. 3D modeling is particularly interesting as the liquids would be forming distinct forms in 3 dimensions and not just in profile. 3D printing would be a viable option as the form matters more then material in this case.
Water on a Leaf