Final Documentation – Calligrobot

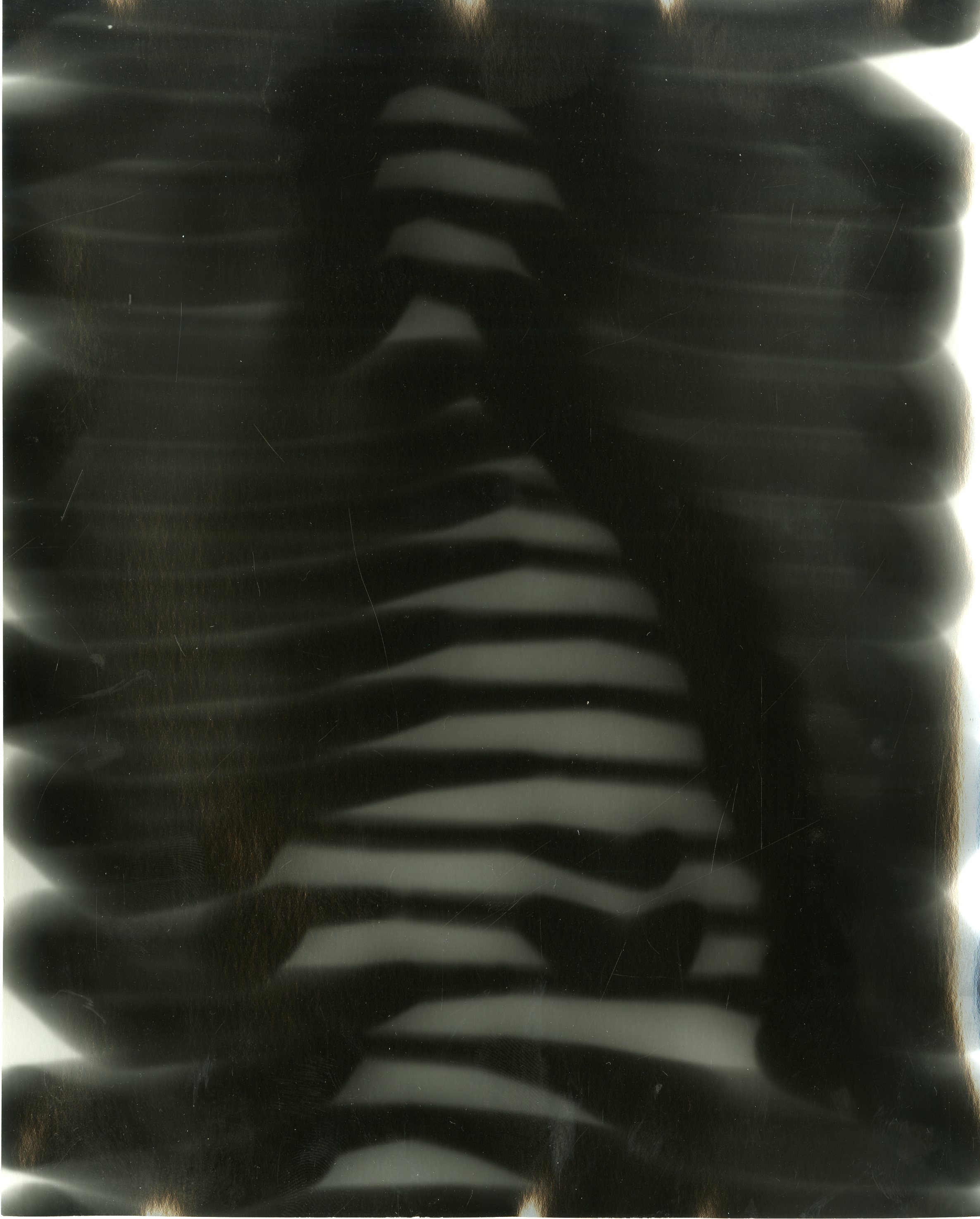
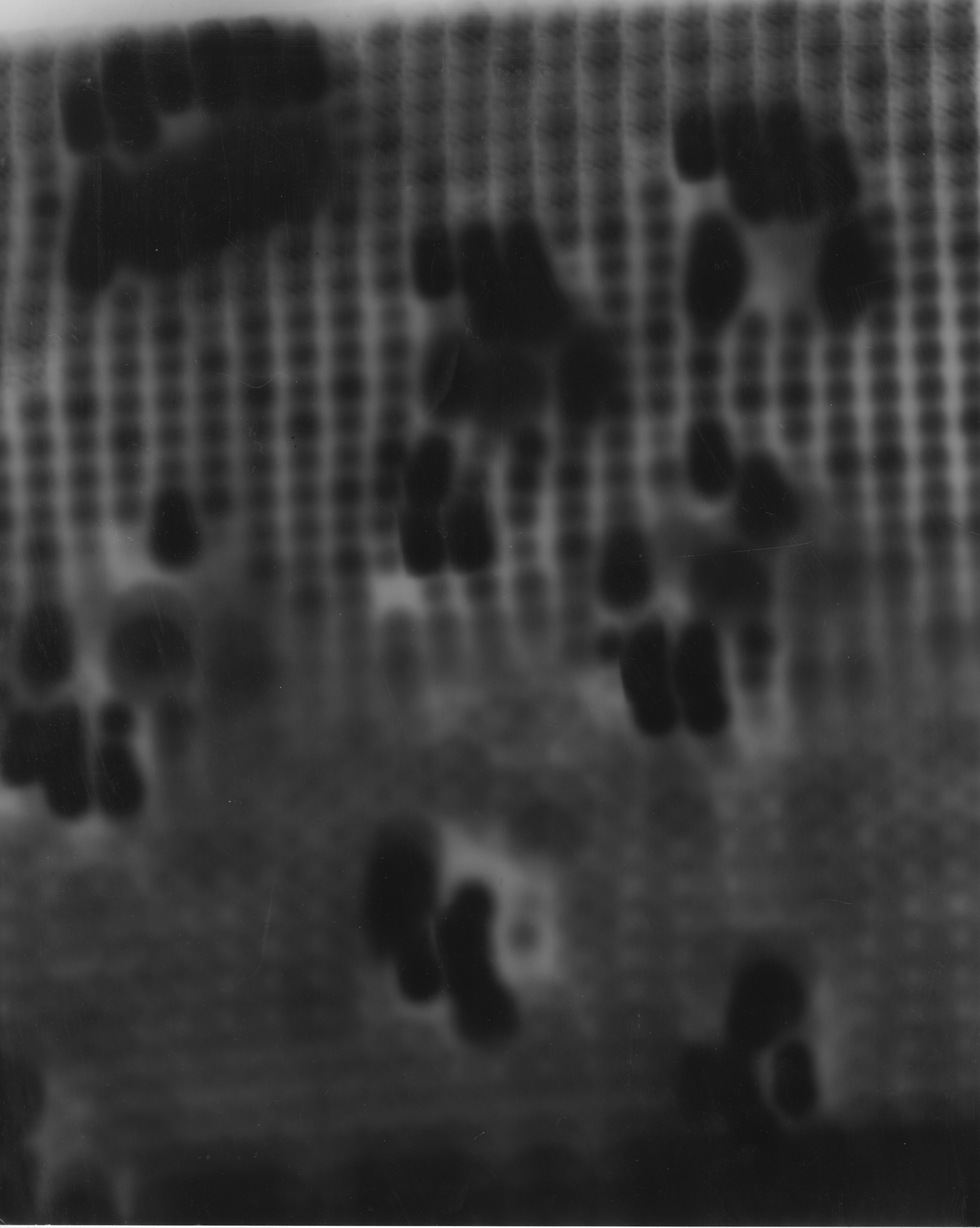
For my final project for Digital Fabrication for the Arts I used the 6-axis ABB IRB 140 robot in the dFAb lab. The goal of the project was to create a tool head that focused light onto photosensitive paper allowing various images and patterns to be programmed into the robot.
The tool design consisted of several elements. A 3D printed head was made to align an LED with a lens shield to control the amount of light that was focused to the paper. The printed part also holds a 12in cardboard tube straight out from the end of the robot. At the end of the tube in a lens that creates the focused beam. The final focal length of the tool was 10in out from the lens. After calculating this measurement I programed the robot to move in and out of focus on the paper so that an image of varying texture, contrast, and light intensity could be programmed.