reminds me of Braitenberg vehicles
PID Control – Robots on Bicycles
A proportional-integral-derivative controller is an mathy solution to a real world problem. www.youtube.com/watch?feature=player_detailpage&v=mT3vfSQePcs#t=13s Problems PID can solve:
- Put a robot on a bicycle
- Precisely maintain temperature of something
- Add appropriate amount of chlorine to a flowing stream
- Keep a spinning plate on a stick
- Control altitude of a pingpong ball on a blower
- Levitate metal objects with an electromagnet
At this point, I would like to warn you. Wikipedia is not your friend for this subject. That article is baffling and mathy. I’ll start the way I did, when I developed a curiosity around this pesky thing a year ago. Deadbang control a method of controlling things with a continuous input and a discrete output. Your home’s thermostat functions this way. You set a temperature on a continuum, and if your home gets colder than a a set amount, it turns on. There is some stickyness(setpoint 75°, but goes on at 73°). This is the simplest way to control closed-loop systems. A closed loop system is one where the output is monitored and adjusted based on real world conditions. Open-Loop things are just assumed to be behaving correctly. Most open-loop things rely on humans to “close the loop” (stop at position/destination) or are simply timed. What PID does is allows for effective and efficient control of things with continuous input and preferable continuous output. In real life, heating water is not as simple as turning the heat on until it is hot enough. Your sensor likely has some sort of delay. Also, the heating element may end up flashing spastically and wearing out with deadbang control. It can do finer things too. The segway relies on PID for balance. It pretends to be a human. There is an Ardurino library that is apparently not horrible. It hides all the math and has autotune. The math is actually simple, but wikipedia makes everything mathy hard. I’ll know more when I’ve actually used it.
Stelarc

Stelarc
I am quite embarrassed to admit that I only discovered Stelarc today. His name is written in several of my notebooks, but I never got around to googleing him. Quite an impressive fellow. For those of you who don’t know him, he had a ear constructed on his forearm out of biocompatible scaffolding and stem cells. This particular project is very complex. I’m just going to go ahead and do the next post on him.

Movatar — Inverse motion capture system
I think this was a concept that got pretty far along and fell to pieces just before implementation. There seems to be no photos of the actual artifact.
Let’s pretend like it is real.
Movatar is a system on inverse motion control. This is a cute way of saying the computer model is controlling the human. This is very pertinent to my vague exploration of PID TEMS control of my limb(s) in both a conceptual and a technical sense. The idea that this is not a machination of the human body but a reversal of data collection justifies some sort of contemplation. The actuator/sensor relationship seems more complicated than 1/other when you involve a bag of flesh. Allowing a computer the privilege of attempting to parse highly elegant human movements is seen as a noble pursuit; a way for the artifice to more closely embody the ‘perfection’ of human nature. Surrendering control of a breathing soul to a crude and ignorant machine strikes some sort of cognitive dissonance with the viewer. They are not reversible concepts at all. That’s prolly what he was going for.
I have spent hours looking at all of his work.
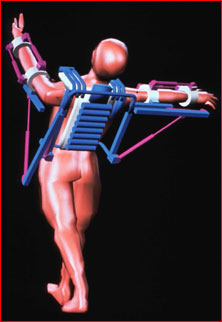
The Third Hand


He made a third hand. It is robotic. It is controlled by his brain by means of impulses from his leg muscles.
Historical Examples of Electrified Humans in Performance
I was lucky enough to encounter a super well written illustrated acedemic journal entitled Electric Body Manipulation as Performance Art: A Historical Perspective.
Here is my response. I recommend skimming the full text.
Quotes:
“…the human body as a display device for algorithms that run on digital computers”
ca. 1800 “Aldini, after having cut off the head of a dog, makes the current of a strong battery go through it: the mere contact triggers really terrible convulsions. The jaws open, the teeth chatter, the eyes roll in their sockets; and if reason did not stop the fired imagination, one would almost believe that the animal is suffering and alive again [42].”
Electronic Muscle Stimulation has a longer history in the arts than I had expected. The first nice example of Transcutaneous Electronic Muscle Stimulation(TEMS) was in the 1860’s. Lookit:

This man’s smile is induce by electric current. It is fake.
Duchenne de Boulogne ~1860’s
What appears at first to be crude early scientific experimentation, takes on an artistic note.
One series of photographs about facial expression was deliberately made with “an old toothless man, with a thin face, whose features, without being absolutely ugly, approached ordinary triviality and whose facial expression was in perfect agreement with his inoffensive character and his limited intelligence” (Fig. 9). Duchenne explained: “I preferred this coarse face to one of noble, beautiful features . . . because I wanted to prove that, despite defects of shape and lack of plas tic beauty, every human face can become spiritually beautiful through the accurate rendering of emotions”
De Boulogne’s motivations were more complex than those of a straight bio-engineering researcher. His findings were published in Mécanisme de la physionomie humaine, which Charles Darwin drew on heavily for his research on emotional expressivity.

Arthur Elsenaar
Mid-90’s facial control art
Project Paradise – 1998
Project Paradise is an very early exploration of issues surrounding telepresence and telexperience. Two participants enter booths in a gallery setting. The booths are equipped with a ringing telephone and a small monitor. When the participant answers the call, they are greeted with a kind voice which explains the interaction. Using the keypad on the phone, they are able to control a naked person in distant jungle setting. Both nude avatars are able to stroke and jab oneanother via the various telephone-controlled motors attached to their limbs. Watch the video, this description does no justice.
Wow. What fun. I am struck with the complexity they are able to glean from such simple analog electronics. Relays, motors, and CCTV combine to shake the particiapnts perception and role as a gallery goer. Is it socially acceptable for one to caress the naked flesh of a stranger? Who is held responsible for the action, the decision-maker or the limb-owner? Is the gesture of affection effectively carried through the medium of touch-tone and CCTV? If so, how far does it travel? All the way from participant to participant it seems unlikely that there would be lossless transmission of affection after all of the state changes. Instantly stripped from the gesture is the bodies of each participant. Eye contact, body language, warmth, physical beauty, even gender are removed at once. Intent and recognition of intent may be all that remain from the point of view of opposing participants. from the point of view of our avatars, the situation is the opposite. Present are their bodie and all that they entail. Eyes, genitals, apparent beauty, and history inorm their experience. These are individuals who have spent many hours caressing one another nude. Their lengthy exchange of contact is lacking a very important facet of intimacy. Intent. Neither party is responsible for their actions, being frequently reminded by the cold and loud apparatus that is driving the contact. The avatars supplement the motors by making small movements that carry on the intent of the limited mechanics. They smile, rub, and appear to be what is clearly a spritely fantastic time.
The Centre for Metahuman Exploration- Field Robotics Center – 1998
Carnegie Mellon University