updated google prezzz
if the above embed code isn’t working, click this link:
docs.google.com/presentation/d/1ExO9wFneI8HdFibu4Rt641Ad7oEW1YbbOSCHphT7J_8/edit?usp=sharing
if the above embed code isn’t working, click this link:
docs.google.com/presentation/d/1ExO9wFneI8HdFibu4Rt641Ad7oEW1YbbOSCHphT7J_8/edit?usp=sharing
www.networkworld.com/slideshow/88419/25-most-beastly-robotic-animals.html#slide1
I believe each of these 25 robots here deserves its own post, put together it is a lot of very interesting projects all of which I suggest looking at. Some are rather bizarre (robotic tail with claimed emotion tracking) or a wailing monkey bot. Even the ones that don’t really work are still interesting for their failings. Some work better for their function while other their forms.
spectrum.ieee.org/automaton/robotics/humanoids/the-uncanny-valley
This article goes much more in depth on uncanny valley for those who are interested. The comments are equally interesting.
spectrum.ieee.org/automaton/robotics/humanoids/an-uncanny-mind-masahiro-mori-on-the-uncanny-valley
This is an interview with Masahiro Mori, the japanese researcher who published the paper coining the term uncanny valley. It took 40 years for it to gain any attention, he speaks about this and more in the interview. The paper was originally called “The Uncanny Valley” and was published in a 1970 issue of ‘Energy,’ a japanese robotics publication.
robots.net/article/3527.html
Robot photos of varying quality, enjoy.
Maschine is part painting robot part crazy massive wooden contraption that uses a rotary paint sprayer on a wooden ramp.
Instead of the robot being the sole painter or creator of the work its acts here as a film through which the painter paints. It is a tool and a filter acting as line of communication which breaks the precise direct technique of painting. What I believe works here is how the form and movement of the painting robot makes it not just a printer to think of separately form the work but part of the work itself. It is also simultaneously part of the painter. This distinction is what I believe separates it from a lot of the other painting robots. I think the contraption nation of the painting robot itself could be pushed farther. Exploring with how far away a painting robot can be from a 2axis brush or standard manufacturing type arm can bring new inaccuracies and distinctiveness to robotic painting.
Using a midi controller, the three differents input pointclouds (3 Kinects) can be adjusted in space and resolution. The resulting combined point cloud is processed by Meshlab to produce a mesh reconstruction. Skeinforge takes the mesh, previously cleaned up through Blender, and outputs a gcode file, which can feed a cnc machine
The strength of this project comes from its well done integration into the public space. It is fortunately not a separate tent or pavilion that users have to enter into. The is an interesting relationship between the permanence of printed objects and the fleeting nature of interacting with a public space. As seen in the video users do interact much differently with this booth then if they did with a photo booth that printed out their picture. So while the purpose of this project seems to be “linking them to under-laying spaces and their own realities.”, in that sense I don’t really it being much different than a photo booth which prints out a unique souvenir as well. What IS interesting is how taking photos is so common and understood in our social vernacular it is always formulaic and boring to take a picture. People have never interacted with a 3d scanner and act much looser and freer with an unknown recording source.
This is a simple robot that balances on two wheels.
I find this type of robot fascinating, I love the element of balance in design. It evokes a sense of awe and excitement. I like how these balancing bots make the act look so effortless.
Andre Stubbe & Markus Lerner : outerspace robot
Roberto Pugliese : Equilibrium
Ed Osborn : Recoil
“outer-space robot” is designed to express a sense of curiosity, the desire to explore the surrounding space looking for contact.
“equilibrium” and “recoil” are robots that work with feedback loops.
The first robot reacts to stimuli from humans while the other two react to stimuli from themselves or robotic counterparts.

Stelarc
I am quite embarrassed to admit that I only discovered Stelarc today. His name is written in several of my notebooks, but I never got around to googleing him. Quite an impressive fellow. For those of you who don’t know him, he had a ear constructed on his forearm out of biocompatible scaffolding and stem cells. This particular project is very complex. I’m just going to go ahead and do the next post on him.
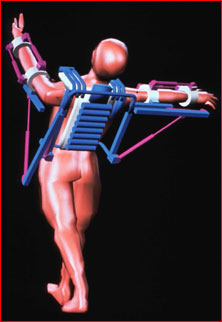

Movatar — Inverse motion capture system
I think this was a concept that got pretty far along and fell to pieces just before implementation. There seems to be no photos of the actual artifact.
Let’s pretend like it is real.
Movatar is a system on inverse motion control. This is a cute way of saying the computer model is controlling the human. This is very pertinent to my vague exploration of PID TEMS control of my limb(s) in both a conceptual and a technical sense. The idea that this is not a machination of the human body but a reversal of data collection justifies some sort of contemplation. The actuator/sensor relationship seems more complicated than 1/other when you involve a bag of flesh. Allowing a computer the privilege of attempting to parse highly elegant human movements is seen as a noble pursuit; a way for the artifice to more closely embody the ‘perfection’ of human nature. Surrendering control of a breathing soul to a crude and ignorant machine strikes some sort of cognitive dissonance with the viewer. They are not reversible concepts at all. That’s prolly what he was going for.
I have spent hours looking at all of his work.
The Third Hand


He made a third hand. It is robotic. It is controlled by his brain by means of impulses from his leg muscles.