this is a nice way to read inputs / control outputs of your arduino using Firamata and a PC or Mac –
this is a nice way to read inputs / control outputs of your arduino using Firamata and a PC or Mac –
if the above embed code isn’t working, click this link:
docs.google.com/presentation/d/1ExO9wFneI8HdFibu4Rt641Ad7oEW1YbbOSCHphT7J_8/edit?usp=sharing
www.youtube.com/watch?v=SfPa0yr2JI8
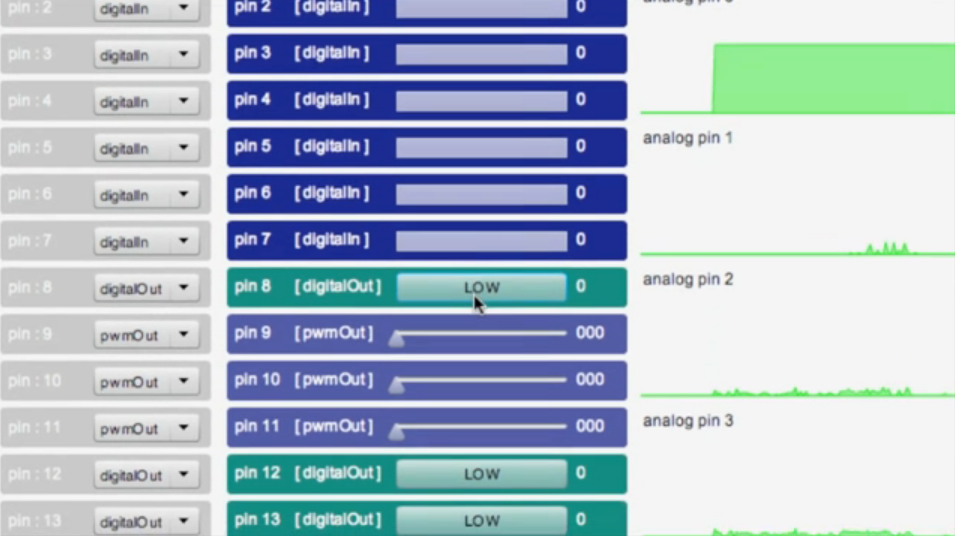
This is a short video showing some of the software I have written so far. I figured a video would be faster and cleaner and able to stay on the blog. For the class update I will show the video and expand on and clarify a few things.
Enjoy the rest of your spring breaks,
Joel
p.s. I even gave it Categories this time! I dont enjoy giving posts categories :<
A proportional-integral-derivative controller is an mathy solution to a real world problem. www.youtube.com/watch?feature=player_detailpage&v=mT3vfSQePcs#t=13s Problems PID can solve:
At this point, I would like to warn you. Wikipedia is not your friend for this subject. That article is baffling and mathy. I’ll start the way I did, when I developed a curiosity around this pesky thing a year ago. Deadbang control a method of controlling things with a continuous input and a discrete output. Your home’s thermostat functions this way. You set a temperature on a continuum, and if your home gets colder than a a set amount, it turns on. There is some stickyness(setpoint 75°, but goes on at 73°). This is the simplest way to control closed-loop systems. A closed loop system is one where the output is monitored and adjusted based on real world conditions. Open-Loop things are just assumed to be behaving correctly. Most open-loop things rely on humans to “close the loop” (stop at position/destination) or are simply timed. What PID does is allows for effective and efficient control of things with continuous input and preferable continuous output. In real life, heating water is not as simple as turning the heat on until it is hot enough. Your sensor likely has some sort of delay. Also, the heating element may end up flashing spastically and wearing out with deadbang control. It can do finer things too. The segway relies on PID for balance. It pretends to be a human. There is an Ardurino library that is apparently not horrible. It hides all the math and has autotune. The math is actually simple, but wikipedia makes everything mathy hard. I’ll know more when I’ve actually used it.
“2 robot interaction”
(Please take notice of my lil gut hangin’ out… this gym is for us lazy kids with bad posture)
The following work by Matthew Hebert (posted below) relates to a discussion Adam, Dakotah, Rob and I had regarding where art belongs…. I think we decided that, eventually, inevitably, it seems to always end up, as all life does, buried in a land pit somewhere. Personally, I don’t mind if stuff I make ends up in the garbage. But I don’t really want to get into a discussion about whether art is “wasteful” or not, or whether it should be “useful” or not.
Instead, let’s just check out this project that might excite Adam, since it combines robotics with design & “utilitarian” shit for your home… you know, furniture.
^ This table is kind of “whimsical” (in a when-robotics-hits-Crate-&-Barrel sort of way?). But the designer is obviously a theory dork (<- no negative connotation), since here we see one of Braitenberg’s vehicles! Maybe 2a style, mentioned on p.6? Though you might not be able to tell from this not very revealing video, these little robots, imprisoned between two sheets of glass, move in the sun, and stay still in the “shade.” Their motors are most likely attached to light sensors. This creates a nice effect when you put something down on the coffee table, since they will flock to it and hide under it. Would I put this in my home if someone gave it to me? Sure. (But as Bob Bingham would ask, “Is it art yet?”)
Here’s another piece based on simple Braiteneberg architectures: a bench that moves itself into the sun (using light sensors in the front, back, and on both sides, as well as a microcontroller). These benches have solar panels on their seats that charge their battery (except, I guess, when someone’s sitting on one…hmmm….) Watch out, this video is rather lengthy.
[Do we always have to use that Strauss composition from 2001 when introducing a monolithic design?][yes]
Coming from the “art” perspective: I think these projects could be more interesting if they complicated the nature of braitenberg architectures, perhaps simultaneously complicating the notion of utilitarian furniture. What if these devices were structured not to be useful? If this furniture made use of slightly extended models of braitenbergian forms (see the Lambrinos / Scheier article)… the emergent behaviors might appear more complex. This could get really weird and interesting, if we’re talking about furniture that is reacting to human use. Incorporating “artificial” learning, or the type of seemingly socially intelligent behaviors discussed in the article we read about folk-psychology might turn a table or a chair into something we really have to think about interacting with…. Heidegger would go bananas.
And last, this Hebert guy takes a stab at “art” !!
After all, if there’s one way to be SURE you’re making art …. it’s by putting it in a museum!
This apparently was a commission from the San Diego Museum of Art in 2011 for a weekly series themed around the topic of “what a city needs.” Here, Hebert says he is approaching this theme “from an interest in power infrastructure and it’s critical importance to the city,” in relation to the often geographical remoteness of most of those forms of power. (Which apparently is especially true in San Diego). Hebert took public domain models from the Google SketchUp library, 3D printed them in ABS plastic, wired electronics to them, and placed them in the museum in what we MIGHT call “non-traditional” locations. Sounds like a well-followed recipe right out o’ the ol’ “art” cookbook to me!
This is a combination of the previous pendulum project and my first pulse modulated motor. This allows me to deliver more power and have control over the speed of the swing.
[pardon my screenshot bootleg, sound is pretty bad… go to the link!]
“First ‘chatbot’ conversation ends in argument”
www.bbc.co.uk/news/technology-14843549
This is an interesting example of robot interaction. Two chatbots, having learned their chat behavior over time (1997 – 2011 !) from previous conversations with human “users” are forced to chat with each other. This BBC video probably highlights what we might consider the “human-interest” element of the story, such as the bots’ discussion of “god” and “unicorns” as well as their so-called “argumentative” sides, supposedly developed from users. With these highlights as examples, it does seem fairly convincing proof that learning from human behavior… makes you sort of human-like! This type of “artificial” learning or evolution is really interesting, as it reflects back what we choose to teach the robots we are using: we really can see that these chatbots have had to live most of their lives on the defensive. I would like to see unedited footage of the interaction. I am sure some of their conversation is a lot more boring. I noticed that the conversation tends towards confusion or miscommunication, almost exemplifying the point about entropy that Robert Weiner makes (p. 20-27): that information carried by a message could be seen as “the negative of its entropy” (as well as the negative logarithm of its probability). And yet, just as it seems the conversation might spiral into utter nonsense (and maybe it does, who knows, this might be some clever editing), the robots seem to pick up the pieces and realize what the other is saying, sometimes resulting in some pretty uncanny conversational harmony about some pretty human-feeling topics. Again, if we saw more of this chat that didn’t become part of a news story, I wonder if this conversation might slip more frequently into moments of entropic confusion. (I think those moments of entropy can tell us as much about the bots’ system of learning as their moments of success (as Heidegger / Graham Harman might say, we only notice things when they’re not working… though I kinda like lil wayne’s version from We be steady mobbin: If it ain’t broke, don’t break it)….
If we view chatbots as an analogue to the types of outside-world-sensing robots we are trying to build, only with words as both their input and output, this seems to show that they really are capable of the type of complex feedback-controlled learning that Weiner suggests (p.24) and that Alan Turing was gearing up for. This experiment is not unlike the really amazingly funny conversation in the Hofstadter reading between “Parry” (Colby), the paranoid robot, and “Doctor” (Weizenbaum), the nondirective-therapy psychiatrist robot (p.595). So, actually, BBC’s claim that this was the “first chatbot conversation” isn’t quite right…
Nonetheless, perhaps an experiment worth trying again on our own time?