Nice firmata interface
this is a nice way to read inputs / control outputs of your arduino using Firamata and a PC or Mac –
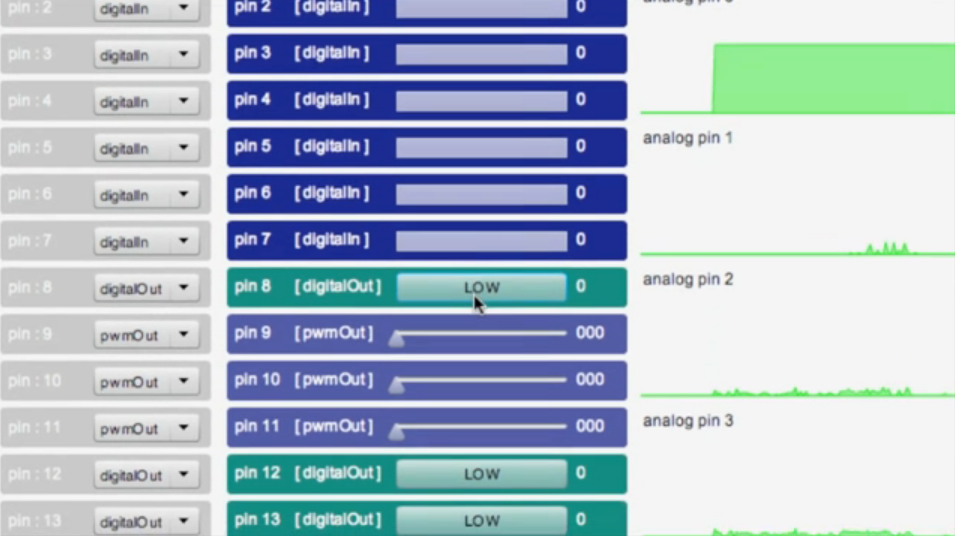
this is a nice way to read inputs / control outputs of your arduino using Firamata and a PC or Mac –
“FRP” – Smart Trashbox
Rodrigo Garcia – hop! the following suitcase.
Smart trashbox is a rubbish can that manoeuvres extremely fast around a room to catch rubbish that you throw.
hop! is a suitcase that follows you around automatically.
The commonality between these two projects is that are both robots that take over tasks that we do not commonly associate as being boring or laborious. These robots are almost analogous to the (I don’t know the term) person who stands in the bathroom of fancy hotels or clubs and hands you a paper towel to dry your hands – they luxury robots – they have to perform their function with pride and dignity.
This is a simple robot that balances on two wheels.
I find this type of robot fascinating, I love the element of balance in design. It evokes a sense of awe and excitement. I like how these balancing bots make the act look so effortless.
Andre Stubbe & Markus Lerner : outerspace robot
Roberto Pugliese : Equilibrium
Ed Osborn : Recoil
“outer-space robot” is designed to express a sense of curiosity, the desire to explore the surrounding space looking for contact.
“equilibrium” and “recoil” are robots that work with feedback loops.
The first robot reacts to stimuli from humans while the other two react to stimuli from themselves or robotic counterparts.
Ruben Broman & erik erikwahlstrom
InstaCRT is a project that allows users to stylise iPhone photos with a “real” filter. photos taken with an iPhone are sent to a 1″ CRT screen in Sweden, a DSLR takes a photo of the screen and sends the image back.
The Descriptive Camera is a camera that sends whatever photo you take with it to “amazon mechanical turk’ – users are asked to describe what is in the photo. The camera then gives a printout of the users description.
These two projects have a few things in common and these elements all combine to make them compelling. 1. They play with distance and time. your photos are digitally sent somewhere in the world to be physically processed by a man or machine before being sent back to you. Variability also plays a role – you can imagine that the current lighting conditions in the artists studio (instaCRT) would affect how images are processed – so too there will be obvious variability in the way an image is interpreted by different people (or the same person at a different time) with the interpretative camera.
This robot analyses your face and based on different facial movements (nostrils, eyes, mouth) different servos are controlled.
Originally it was planned that there would be an accelerometer at the end of the arm and that the small servos would move in relation to the large servos based on accelerometer data.
Click here for video
Empathetic robo.
This robot tries to simulate and reflect human expression as closely as possible – it empathises with whoever is is talking to. This is a key requirement for humans to perceive a robot as truly intelligent ( dautenhahn et al.). But I think this attempt in wrong direction – as with paradox of animation, make something too life like and something just feels wrong about it.
11 nueral connections – same as discussed Braiteneberg, possibly most similar to vehicle 4
find “food source” – light ring and avoid dark ring.
“artificial neural network controlled by a binary “genome”. The network consisted of 11 neurons” – connections between sensors and motors. The “neurones” were linked by 33 synapses and strength of each connection controlled by 8bit gene – extended braitenberg – different processes running in parallel .
100 groups of 10 robots – the top 200robots (robots with the most points) mated together to shuffle there “genes”
another round – started to evolve to not shine blue light when “feeding” a third of the robots actually became repulsed to the blue light.

Complexity from environment.

This device records subtle eye movements while your eyes are open. When you blink the recording stops and your eye movements are translated into X & Y movement through servos which manipulate a long rod – exaggerating an otherwise subtle and unnoticed motion.
This device will be expanded to record more facial movements and translate them into other forms of mechanical movement.

“I started hearing colours in my dreams”
Neil Harrison(b. 1982 in Belfast, Northern Ireland)
CYBORG FOUNDATION | Rafel Duran Torrent from Focus Forward Films on Vimeo.