Nice firmata interface
this is a nice way to read inputs / control outputs of your arduino using Firamata and a PC or Mac –
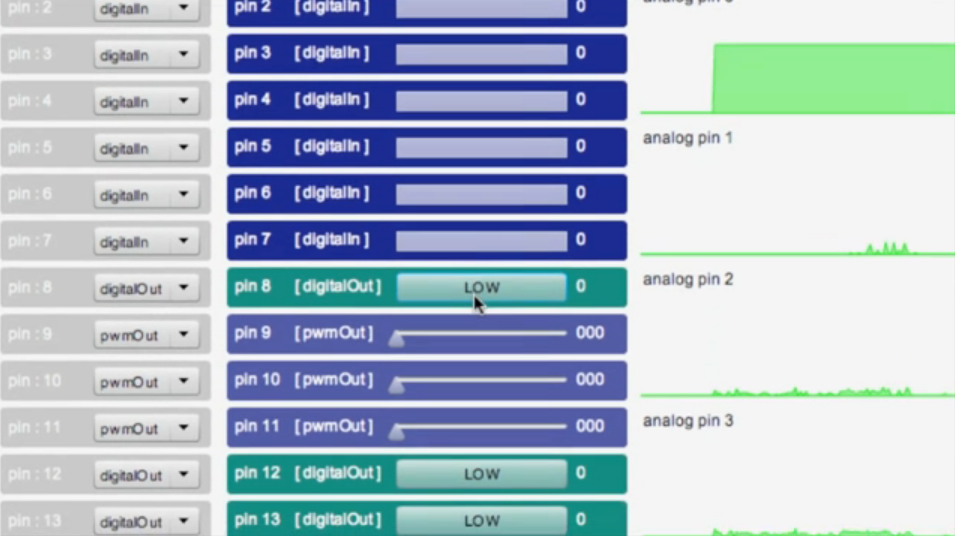
this is a nice way to read inputs / control outputs of your arduino using Firamata and a PC or Mac –
A proportional-integral-derivative controller is an mathy solution to a real world problem. www.youtube.com/watch?feature=player_detailpage&v=mT3vfSQePcs#t=13s Problems PID can solve:
At this point, I would like to warn you. Wikipedia is not your friend for this subject. That article is baffling and mathy. I’ll start the way I did, when I developed a curiosity around this pesky thing a year ago. Deadbang control a method of controlling things with a continuous input and a discrete output. Your home’s thermostat functions this way. You set a temperature on a continuum, and if your home gets colder than a a set amount, it turns on. There is some stickyness(setpoint 75°, but goes on at 73°). This is the simplest way to control closed-loop systems. A closed loop system is one where the output is monitored and adjusted based on real world conditions. Open-Loop things are just assumed to be behaving correctly. Most open-loop things rely on humans to “close the loop” (stop at position/destination) or are simply timed. What PID does is allows for effective and efficient control of things with continuous input and preferable continuous output. In real life, heating water is not as simple as turning the heat on until it is hot enough. Your sensor likely has some sort of delay. Also, the heating element may end up flashing spastically and wearing out with deadbang control. It can do finer things too. The segway relies on PID for balance. It pretends to be a human. There is an Ardurino library that is apparently not horrible. It hides all the math and has autotune. The math is actually simple, but wikipedia makes everything mathy hard. I’ll know more when I’ve actually used it.
The following work by Matthew Hebert (posted below) relates to a discussion Adam, Dakotah, Rob and I had regarding where art belongs…. I think we decided that, eventually, inevitably, it seems to always end up, as all life does, buried in a land pit somewhere. Personally, I don’t mind if stuff I make ends up in the garbage. But I don’t really want to get into a discussion about whether art is “wasteful” or not, or whether it should be “useful” or not.
Instead, let’s just check out this project that might excite Adam, since it combines robotics with design & “utilitarian” shit for your home… you know, furniture.
^ This table is kind of “whimsical” (in a when-robotics-hits-Crate-&-Barrel sort of way?). But the designer is obviously a theory dork (<- no negative connotation), since here we see one of Braitenberg’s vehicles! Maybe 2a style, mentioned on p.6? Though you might not be able to tell from this not very revealing video, these little robots, imprisoned between two sheets of glass, move in the sun, and stay still in the “shade.” Their motors are most likely attached to light sensors. This creates a nice effect when you put something down on the coffee table, since they will flock to it and hide under it. Would I put this in my home if someone gave it to me? Sure. (But as Bob Bingham would ask, “Is it art yet?”)
Here’s another piece based on simple Braiteneberg architectures: a bench that moves itself into the sun (using light sensors in the front, back, and on both sides, as well as a microcontroller). These benches have solar panels on their seats that charge their battery (except, I guess, when someone’s sitting on one…hmmm….) Watch out, this video is rather lengthy.
[Do we always have to use that Strauss composition from 2001 when introducing a monolithic design?][yes]
Coming from the “art” perspective: I think these projects could be more interesting if they complicated the nature of braitenberg architectures, perhaps simultaneously complicating the notion of utilitarian furniture. What if these devices were structured not to be useful? If this furniture made use of slightly extended models of braitenbergian forms (see the Lambrinos / Scheier article)… the emergent behaviors might appear more complex. This could get really weird and interesting, if we’re talking about furniture that is reacting to human use. Incorporating “artificial” learning, or the type of seemingly socially intelligent behaviors discussed in the article we read about folk-psychology might turn a table or a chair into something we really have to think about interacting with…. Heidegger would go bananas.
And last, this Hebert guy takes a stab at “art” !!
After all, if there’s one way to be SURE you’re making art …. it’s by putting it in a museum!
This apparently was a commission from the San Diego Museum of Art in 2011 for a weekly series themed around the topic of “what a city needs.” Here, Hebert says he is approaching this theme “from an interest in power infrastructure and it’s critical importance to the city,” in relation to the often geographical remoteness of most of those forms of power. (Which apparently is especially true in San Diego). Hebert took public domain models from the Google SketchUp library, 3D printed them in ABS plastic, wired electronics to them, and placed them in the museum in what we MIGHT call “non-traditional” locations. Sounds like a well-followed recipe right out o’ the ol’ “art” cookbook to me!

Reading about robotic gardeners reminded me of my Uncle Rodger. He farms over 80,000 acres out in Kansas and purchases new equipment every few years. Last summer he and I had a conversation about his process and he mentioned various robotic equipment including this combine harvester. The machinery uses GPS and various sensors to guide the combine along the planted rows, turn around, and align itself again harvesting in the opposite direction. An employee still rides along to monitor the behavior of the machine. Rodger said that employing these robots they are able to yield more of the crop otherwise missed by human error. After poking around the web I found this post on arduino forum where a DIY’er modified his combine to behave in the same why with relatively cheap components.
Nancy, Nearsighted Narcissist

Apologies for this bad documentation taken at 1 am, when the sensor was still working.
Cold description: Sharp analog distance sensor as input. Values above 200, or objects close enough to sensor, trigger actuation of blower (via arduino & break out to relay module switching blower power on and off)
Warm description: When Nancy “sees” her own reflection in the mirror, she augments her voluminous hair and lips.
If I could give her a song, it would be this one:
Electric Shock Wind Reprieve
A low-voltage electric shock is delivered to my arm.
When I blow on the wind sensor, I am granted a temporary reprieve from the pain. The duration of the break lasts as long as I blow times two.
