I had to start over on a different board after I realized the other one had printed white rectangles encompassing several pin holes meaning that they were connected internally.
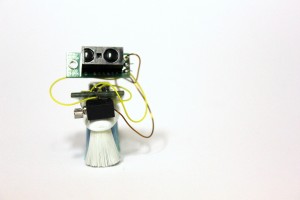
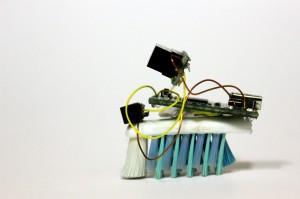
– Bristle uses a small vibrating motor to move.
– He avoids being picked up or touched.
– He uses an infrared distance sensor to perceive the word.
– After some persistence bristle will become accustomed to you and allow you to pick him up.
Apologies for this bad documentation taken at 1 am, when the sensor was still working.
Cold description: Sharp analog distance sensor as input. Values above 200, or objects close enough to sensor, trigger actuation of blower (via arduino & break out to relay module switching blower power on and off)
Warm description: When Nancy “sees” her own reflection in the mirror, she augments her voluminous hair and lips.